
OpenLab Workshop 「JAM2025:空間をつなぐRube Goldberg machineの制作」を2025年2月20日(木)と3月6日(木)の2日間で開催しました。参加者は情報学部の学生を中心に情報学研究科(大学院)やデザイン学部、理工学部、人文学部福祉実践学科、心理学研究科(大学院)など、幅広い学部学科の学生から参加申し込みを頂きました。また、今回はなんと明星高校からも学生さんが参加して下さいました。たくさんの申し込みありがとうございました!
3名の講師陣
ワークショップ概要
OpenLabdでは、毎年学期末にJAMワークショップを開催しています。JAMワークショップでは、情報学部生だけでなく、他学部の学生や、地域の住民など、多様な利用者同士が共に作ることを楽しみ、コラボレーションする事で新しい価値を発見することを目的に開催しています。タイトルにあるルーブ・ゴールドバーグ・マシン(Rube Goldberg machine)とは、マーブルマシンやピタゴラ装置とも言われ、長いコース上をボールが転がり、様々な仕掛けやからくり装置を起動させながら、ゴールに向かって進んでいく装置を指します。次はどんなコースが待っているのか、どんな仕掛けが作動するのかと、見ているだけでとてもワクワクしますよね。
そして今回のJAM2025では、空間をつなげるルーブ・ゴールドバーグ・マシン(Rube Goldberg machine)を制作します。通常の装置は1つのコースを完走すると終わってしまいますが、情報技術を加えることで、離れた空間のコースと連動したり、複数のコースに分岐したり、繰り返しコースを周回する事もできます。これはプログラミングに用いられるアルゴリズムにも例えることができますね。このワークショップでは、装置(コース)を3Dプリンタで制作し、空間を繋げる方法をプログラミングを用いて、参加者全員で「空間をつなげるルーブ・ゴールドバーグ・マシン」を制作しました。本ブログでワークショップの内容について紹介していきたいと思います。
-

- 大石先生からの説明

-

- 組み立て中の様子4

Day1:3D CADを使ったコースの3Dデータ作成&物理シミュレーション
1日目は、3D CADを使ってコースの3Dデータを作成します。1日目で作ったコースを3Dプリンタで印刷し2日目にコースの制御と連動を行います。
3D CADにはWeb上で3Dモデリングが可能なAutoDeskのTinkerCADを使用しました。
大石先生からワークショップの概要が伝えられたあと、CADを初めて触る学生もいたので、指導員の菊池さんから簡単な操作方法のレクチャーがありました。TinkerCADは操作が直感的で初めての学生でもすぐに使いこなす事ができていました。とは言え、立体のコースを最初からCADで作っていくのはとても大変です。そこで、大石先生が用意してくれたコーススケッチを使ってまずは平面の紙にコースのデザインを作成していきます。参加者各々がコースのテーマやどんなパーツを使うかなど考えながらスケッチしていました。スケッチが完成したら今度はCADで立体に起こしていきます。
スケッチを元にTinkerCADからパーツを選定し、3次元空間に配置していきます。
-
- 大石先生からの説明
-

- TinkerCADの練習
-
- コーススケッチ
-
- スケッチを元にモデリング
CADの操作にも慣れ、どんどんコース形が出来上がってきました。しかし、CAD上の仮想空間内で作ったコースで本当に球が転がるのかと疑問もあります。そこで、TinkerCADの1つ物理シミュレータSimLabを使って、仮想空間上でボールが転がるかをシミュレートしてみます。SimLabで球に使うビー玉の大きさ16mmの球体を用意しコースのスタート位置に配置します。シミュレーションをスタートすると綺麗に転がる人もいましたが、球が途中で止まってしまう人やコースから落下してしまう人もいたので、事前にSimLabで確認しておいて良かったです。
-

- コース作成中の様子
-
- SimLabでシミュレーション
そして、最後は参加者全員SimLab上でコースを完走する事ができました。本日作った3Dモデルのデータを次回までに、菊池さんが3Dプリンタで印刷してくれます。
次回、完成が楽しみですね!
Day2:コース組み立てとマイコンを使ってボールの制御
2日目は、前回作ったコースを組み立てて、マイコンを使って制御をしていきます。3D CADで制作したコースを3Dプリンタでパーツごとに印刷し、これを接着剤でくっつけて組み立ていきます。

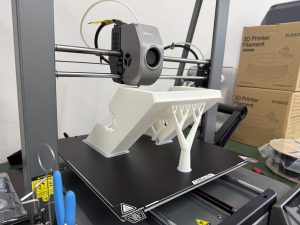

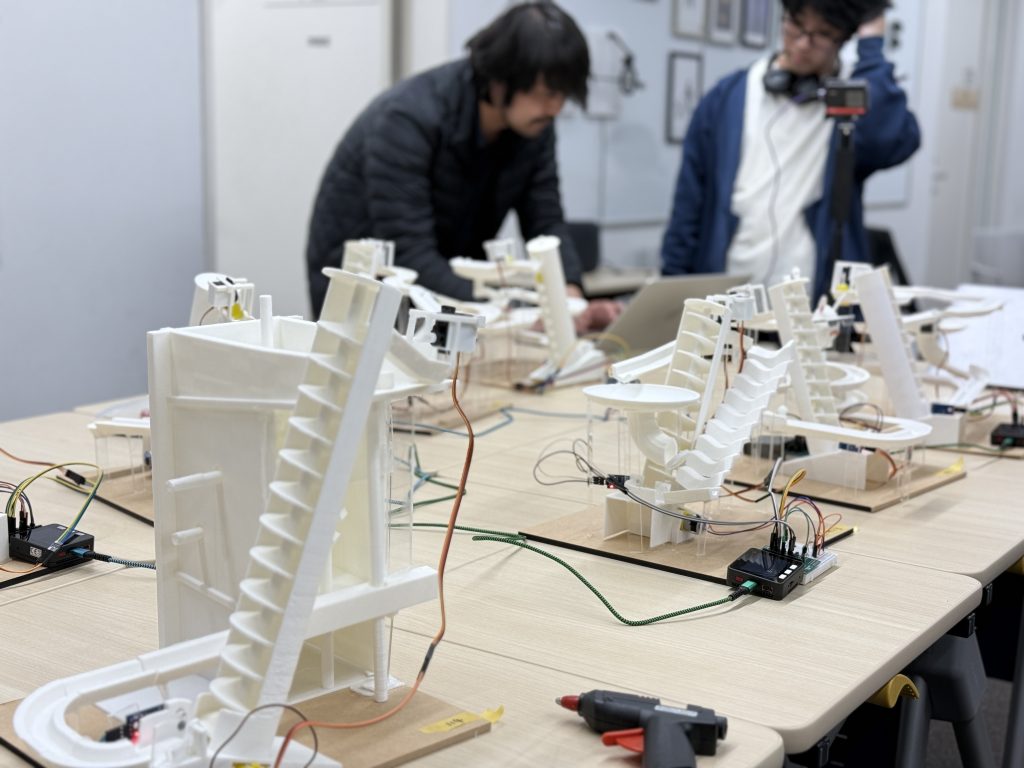
印刷したコースを参加者に配布し、各々組み立て作業に入ります。コースの大きさによってパーツ数が異なるため、大きいコースを作った人は、組み立て作業が大変です!
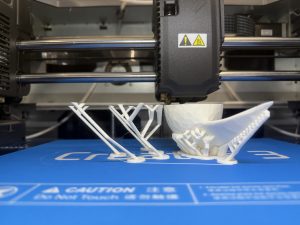
前回のTinkerCADの画面を見ながら組み立てしていきます。螺旋状のコースを作った人や階段状のコースを作った人など、みなさん個性あふれるコースをモデリングしてくれました。 また、コースに分岐を作った人は、サーボモータでどちらのコースに行くかプログラムで制御することもできます。中には、コースに3つのサーボモータをつけている人もいました。どんなコースが完成するか楽しみですね!
-

- 組み立て中の様子1
-

- 組み立て中の様子2
-

- 組み立て中の様子3
-
- 組み立て中の様子4
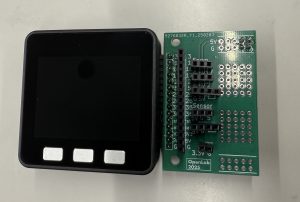
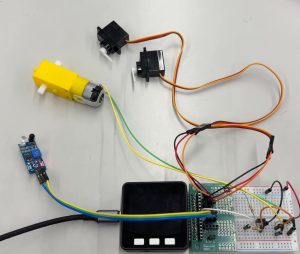
組み立ても終盤位差し掛かり、何人かコースの完成形が見えてきました。コースが出来上がってきたら今度はマイコンとモータ、センサをコースに組み込んでいきます。モータやセンサの配線は少し手間がかかりますが、今回大石先生が専用基板を作成してくださり、通常より楽に配線をする事ができるようになりました。制御用マイコンにはWi-Fi接続が可能なM5Stackを使用し、赤外線障害物センサとサーボモータ、DCギアモータを専用基板に配線します。M5Stackを使うことでネットワーク経由で他のM5Stackに信号を送ることができます。これにより障害物センサで球がゴールしたことを判定し、次のコースのM5Stackにゴールしたことを伝え、スタート位置のサーボモータが球を解放する事で、コースを連動させる事ができます。
M5Stackだけでも連動はできますが、少しプログラムが複雑になってしまいます。そこで、講師の遠藤先生がRaspberriPiとNodeRedを使ってサーバを構築して下さいました。
これにより、M5Stackはラズパイサーバを経由して次のM5Stackに信号を届けることができる様になり、サーバのプログラムを変更する事で、逆周りにコースを連動させたり、ランダムに連動させるなどもM5Stackのプログラムを変更せずにできる様になりました。
-
- M5Stackと専用基板
-
- 配線の様子
-

- 完成した作品1
-
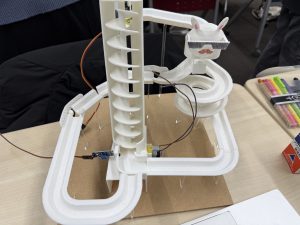
- 完成した作品2
コースが完成した人は、連動の準備と最終調整を進めていきます。SimLab上では綺麗に完走できても、現実だとスピードが出過ぎてコースアウトしてしまったり、途中で止まってしまったりと調整が必要になります。連動のバトンを止めないように、みなさん最後まで細かい調整をしていました。

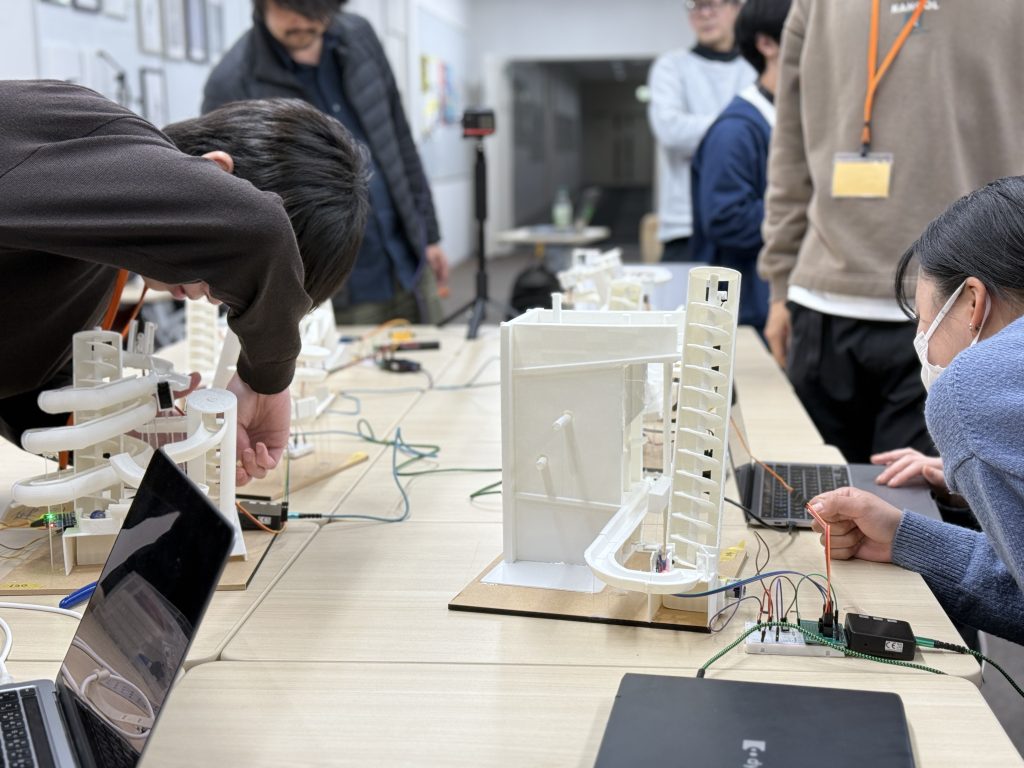

最後に全コースを繋げ、完走を目指す!
参加者全員のコースが完成しました!さぁ、全員でバトンを繋いで完走することはできるのでしょうか!実際の様子を下記の動画からどうぞ!
見事に全員のコースを連動して繋げる事ができました!!!
最後に
この度は、OpenLab Workshop「JAM2025:空間をつなぐRube Goldberg machineの制作」の活動記事をご覧いただきありがとうございました。また、ワークショップに参加してくださった学生の皆様、講師陣の皆様にも深く感謝申し上げます。今回は、3D CADと3Dプリンタを使ってRube Goldberg machineのコースを作成し、M5Stackマイコンを使ってネットワーク経由でコース同士を繋げる事ができました。ネットワークが繋がる範囲であればもっと離れた距離でもコースを繋げる事ができます。発展させたら学内中や世界中にも繋げることができるかもしれないですね。たまに失敗してしまうのでその時は近くにいる人に手伝ってもらいましょう。そうすれば繋がるのはコースだけでなく離れた人同士の関係も繋ぐことができますね!
OpenLabではこれからも面白いワークショップを開催し続けていきたいと思います。
次のワークショップにもご期待ください。
開催期間:2025年2月20日(木) 、 3月6日(木)の2日間開催(本ワークショップは終了いたしました)
開催時間:10:00〜17:00
開催場所:オープンラボ(明星大学28号館126教室)
講師:大石彰誠、遠藤勝也、菊池康太
お問い合わせ:kota.kikuchi@meisei-u.ac.jp